嵌入式驅(qū)動(dòng)開(kāi)發(fā)與人工智能基礎(chǔ)軟件開(kāi)發(fā) 以傳感器接口與視頻輸出為例
隨著物聯(lián)網(wǎng)與邊緣計(jì)算的迅猛發(fā)展,嵌入式系統(tǒng)正日益成為連接物理世界與數(shù)字智能的關(guān)鍵樞紐。在這一背景下,嵌入式驅(qū)動(dòng)開(kāi)發(fā)與人工智能(AI)基礎(chǔ)軟件開(kāi)發(fā)的融合,為智能設(shè)備賦予了感知、決策與交互的能力。本文將以典型的傳感器接口(如vip0 porta, vip0 portb, vip1 porta, vip1 portb)和視頻輸出接口(如dvo0 vout1, dvo1 vout0)為例,探討這兩大技術(shù)領(lǐng)域如何協(xié)同工作,共同構(gòu)建智能化嵌入式解決方案。
一、嵌入式驅(qū)動(dòng)開(kāi)發(fā):硬件接口的橋梁
嵌入式驅(qū)動(dòng)是操作系統(tǒng)與硬件設(shè)備之間的通信橋梁,其核心任務(wù)是初始化硬件、管理數(shù)據(jù)傳輸并處理中斷。在復(fù)雜的嵌入式系統(tǒng)中,如涉及多路視頻輸入處理與顯示輸出的場(chǎng)景,驅(qū)動(dòng)開(kāi)發(fā)的精細(xì)度直接決定了系統(tǒng)的穩(wěn)定性和性能。
- 傳感器視頻輸入端口(VIP)驅(qū)動(dòng):
- vip0 porta / vip0 portb 與 vip1 porta / vip1 portb 通常代表芯片上的多路視頻輸入通道。例如,在安防監(jiān)控或自動(dòng)駕駛系統(tǒng)中,這些端口可能連接攝像頭、雷達(dá)等傳感器,用于捕獲實(shí)時(shí)視頻流。
- 驅(qū)動(dòng)開(kāi)發(fā)需實(shí)現(xiàn):
- 硬件初始化:配置寄存器,設(shè)置分辨率、幀率、數(shù)據(jù)格式(如YUV、RGB)。
- 數(shù)據(jù)傳輸:通過(guò)DMA(直接內(nèi)存訪問(wèn))或中斷機(jī)制,將傳感器數(shù)據(jù)高效搬運(yùn)至內(nèi)存,減少CPU開(kāi)銷。
- 同步與多路復(fù)用:協(xié)調(diào)多端口數(shù)據(jù)流,確保時(shí)間同步,避免數(shù)據(jù)沖突。
- 實(shí)際應(yīng)用中,vip0和vip1可能對(duì)應(yīng)不同的傳感器類型(如可見(jiàn)光與紅外),驅(qū)動(dòng)需支持靈活的配置策略。
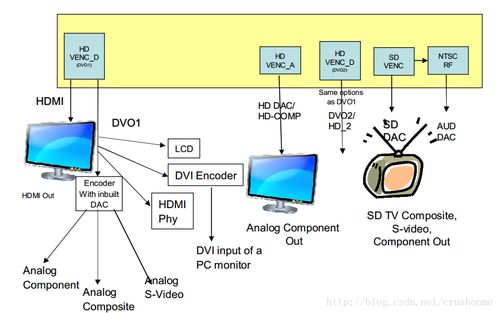
- 數(shù)字視頻輸出(DVO)驅(qū)動(dòng):
- dvo0 vout1 與 dvo1 vout0 代表視頻輸出接口,用于驅(qū)動(dòng)顯示器、LCD屏幕或傳輸視頻流至其他設(shè)備。
- 驅(qū)動(dòng)開(kāi)發(fā)重點(diǎn):
- 顯示控制:配置時(shí)序參數(shù)(如行頻、場(chǎng)頻)、色彩空間轉(zhuǎn)換,確保輸出圖像穩(wěn)定。
- 多層疊加:支持圖形層、視頻層混合,實(shí)現(xiàn)OSD(屏幕顯示)或GUI疊加。
- 低功耗管理:根據(jù)輸出內(nèi)容動(dòng)態(tài)調(diào)整刷新率,延長(zhǎng)嵌入式設(shè)備續(xù)航。
二、人工智能基礎(chǔ)軟件開(kāi)發(fā):從感知到智能
AI基礎(chǔ)軟件為嵌入式系統(tǒng)注入“大腦”,使原始傳感器數(shù)據(jù)轉(zhuǎn)化為有價(jià)值的信息。其開(kāi)發(fā)涵蓋算法集成、模型優(yōu)化與推理框架部署。
- 數(shù)據(jù)預(yù)處理與加速:
- 從vip端口獲取的原始視頻流,需經(jīng)過(guò)裁剪、歸一化、格式轉(zhuǎn)換等預(yù)處理,才能輸入AI模型。驅(qū)動(dòng)與AI軟件的協(xié)作至關(guān)重要——例如,驅(qū)動(dòng)可直接輸出YUV數(shù)據(jù),AI庫(kù)利用NEON或GPU加速轉(zhuǎn)換至RGB,減少CPU負(fù)載。
- 在資源受限的嵌入式環(huán)境中,預(yù)處理常通過(guò)硬件IP(如圖像信號(hào)處理器ISP)實(shí)現(xiàn),驅(qū)動(dòng)需暴露控制接口供AI軟件調(diào)用。
- 模型部署與推理優(yōu)化:
- 針對(duì)邊緣設(shè)備,AI軟件需集成輕量級(jí)模型(如MobileNet、YOLO-Tiny),并利用TensorFlow Lite、ONNX Runtime等框架進(jìn)行部署。
- 優(yōu)化策略包括:
- 量化:將浮點(diǎn)模型轉(zhuǎn)換為8位整數(shù),降低內(nèi)存占用與功耗。
- 剪枝:移除冗余神經(jīng)元,提升推理速度。
- 硬件加速:利用NPU(神經(jīng)網(wǎng)絡(luò)處理器)或DSP運(yùn)行模型,驅(qū)動(dòng)需提供底層內(nèi)存映射與中斷服務(wù)。
- 智能視頻分析實(shí)例:
- 通過(guò)vip0 porta接入的攝像頭視頻,經(jīng)AI軟件分析后,可實(shí)時(shí)檢測(cè)人臉、車輛或異常行為。結(jié)果通過(guò)dvo0 vout1輸出至監(jiān)控屏幕,并疊加告警框與OSD信息。
- 此流程中,驅(qū)動(dòng)確保低延遲數(shù)據(jù)流,AI軟件實(shí)現(xiàn)高精度分析,二者通過(guò)共享內(nèi)存或IPC(進(jìn)程間通信)高效交互。
三、融合挑戰(zhàn)與未來(lái)趨勢(shì)
嵌入式驅(qū)動(dòng)與AI軟件的協(xié)同仍面臨諸多挑戰(zhàn):
- 實(shí)時(shí)性:硬實(shí)時(shí)驅(qū)動(dòng)與軟實(shí)時(shí)AI推理的協(xié)調(diào),需精細(xì)設(shè)計(jì)任務(wù)調(diào)度與中斷處理。
- 資源限制:內(nèi)存、算力與功耗的平衡,驅(qū)動(dòng)需動(dòng)態(tài)調(diào)整傳感器采樣率,AI軟件需自適應(yīng)模型復(fù)雜度。
- 標(biāo)準(zhǔn)化:業(yè)界正推動(dòng)標(biāo)準(zhǔn)化接口(如Android NN API、ROS 2),簡(jiǎn)化驅(qū)動(dòng)與AI軟件的集成。
隨著AI芯片(如華為昇騰、英偉達(dá)Jetson)的普及,驅(qū)動(dòng)將更深度集成AI硬件加速功能,而AI基礎(chǔ)軟件將向自適應(yīng)學(xué)習(xí)與聯(lián)邦學(xué)習(xí)演進(jìn),使嵌入式設(shè)備具備持續(xù)優(yōu)化的智能。
從vip端口的傳感器數(shù)據(jù)采集,到dvo端口的智能信息呈現(xiàn),嵌入式驅(qū)動(dòng)開(kāi)發(fā)與人工智能基礎(chǔ)軟件開(kāi)發(fā)構(gòu)成了智能嵌入式系統(tǒng)的“手足”與“大腦”。唯有二者緊密協(xié)作,方能解鎖邊緣智能的無(wú)限潛力,推動(dòng)智能制造、智慧城市與自動(dòng)駕駛等領(lǐng)域的創(chuàng)新突破。開(kāi)發(fā)者需既精通底層硬件細(xì)節(jié),又洞悉AI算法特性,方能在這場(chǎng)技術(shù)融合浪潮中立于不敗之地。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.mutianyu.com.cn/product/77.html
更新時(shí)間:2026-04-16 20:21:38